




Model Description of Hollow Rotary Platform

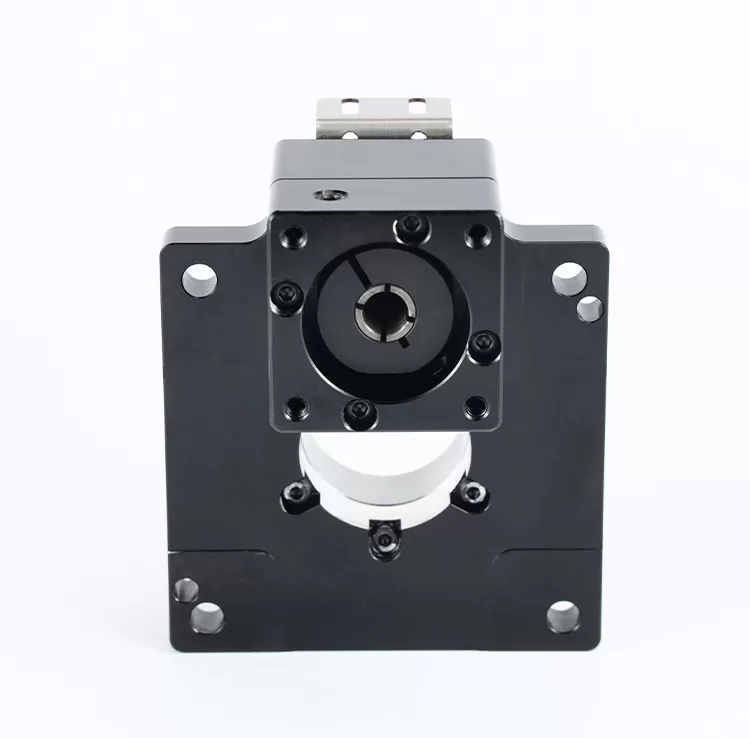
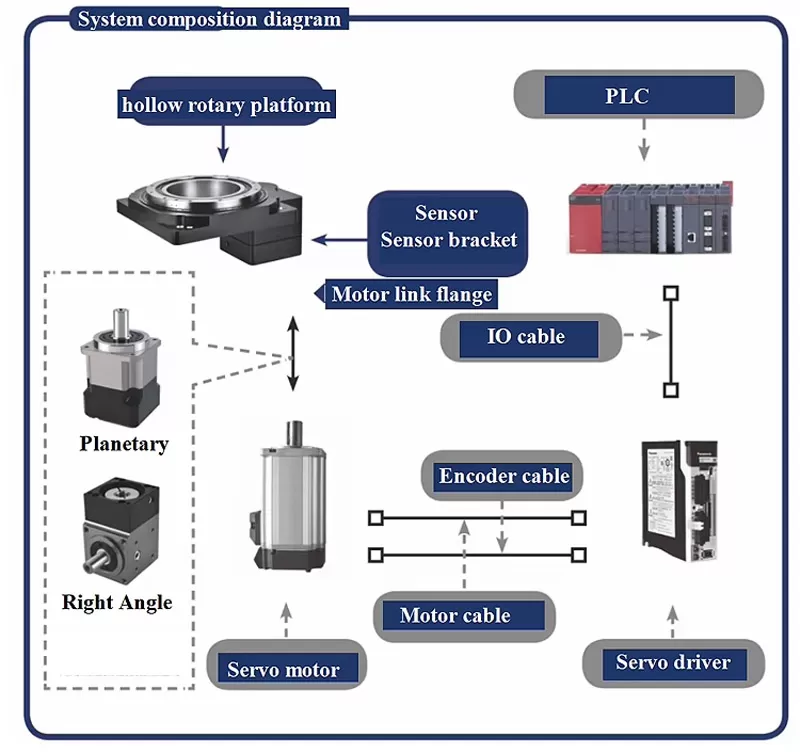
High Precision Hollow Rotary Platform Solutions
Free installation: horizontal, vertical and upside down installation
Accurate positioning: the accuracy can reach ±0.004°
High rigidity: max load up to 500 N·m
High output: max inertia up to 200N.m
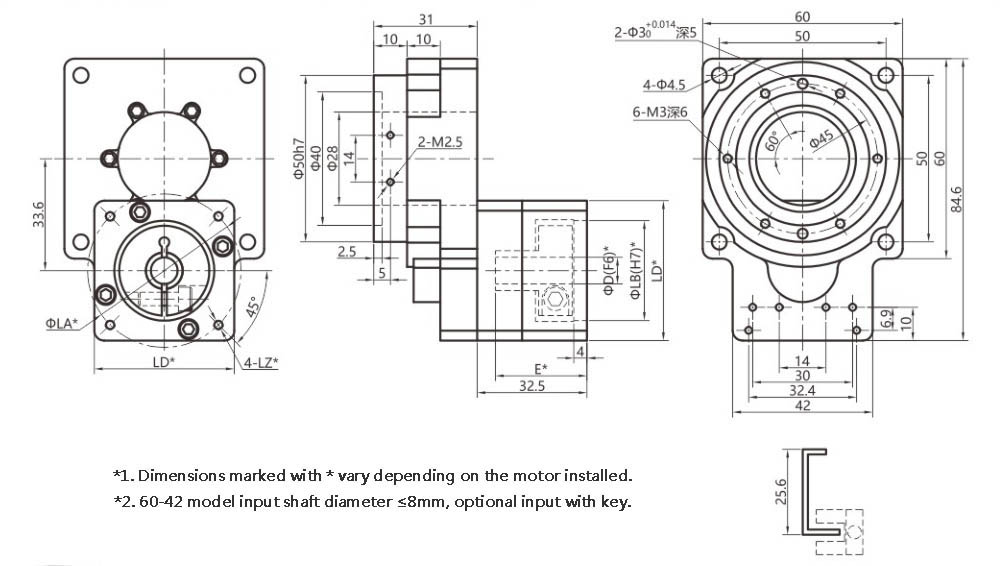
Outline Dimension Drawing of Hollow Rotary Platform
Adapting Motor
| Specification | ØD | E | LB | LZ | LA | LD |
| 100W Servo | Ø8 | 27.5 | Ø30 | 4-M3 | D45 | 42*42 |
| Ø8 | 27.5 | Ø30 | 4-M4 | D46 | 42*42 | |
| 42 Stepper | Ø5 | 27.5 | Ø22 | 4-Φ3.5 | Ø43.8(31*31) | 42*42 |
| 57 Stepper | Ø6.35/Ø8 | 27.5 | Ø38.1 | 4-M4 | Ø66.6(47.14*47.14) | 57*57 |
Hollow Rotating Platform Parameters
| Content | Unit | Value |
| Reduction ratio | i | 5 |
| MIT Art | Crossed roller bearings | |
| Allowable torque | Nm | 10 |
| Allowable inertia torque | Nm | 20 |
| Max pitch moment | Nm | 137 |
| Max. radial force | mm | 1930 |
| Max. axial force | 1930 | |
| Backlash | P0 arcmin | ≤1(±0.5) |
| Rated input speed | rpm | 2000 |
| Max. input speed | rpm | 3000 |
| Max. efficiency | % | 95% |
| Working temperature | ℃ | 25°~+90° |
| Face runout of rotary platform | mm | ↗0.01 |
| Radial runout of rotary platform | mm | ↗0.01 |
| Design bearing | kg | 15 |
| Lubrication | Life lubrication | |
| Degree of protection | IP | IP50 |
| Lifetime | h | 20000 |
| Noise | dB | ≤65 |
| Weight | kg | 0.54 |
*1、Ratio i=Nin/Nout(Input speed/output speed)
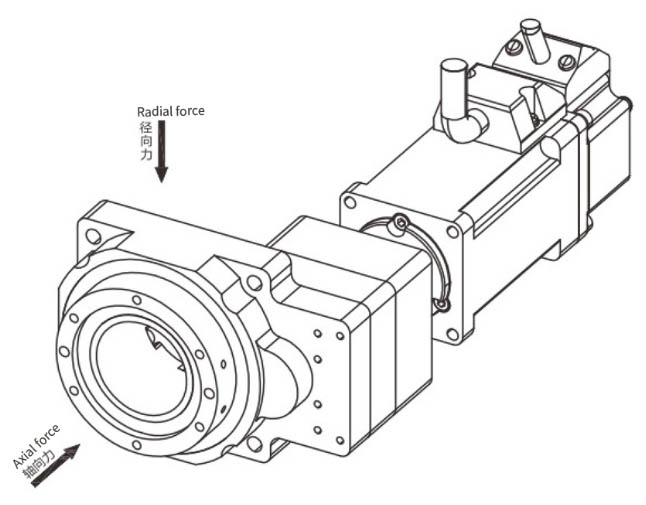
*2.When the speed of the output shaft of the reducer is100r/min, it acts on the midpoint of the output shaft of the reducer, and the direction of action is perpendicular to the output shaft, meeting the maximum radial force that the output shaft can withstand when the life of the reducer is20000H.
*3、High/low temperature grease can be customized according to the use environment.
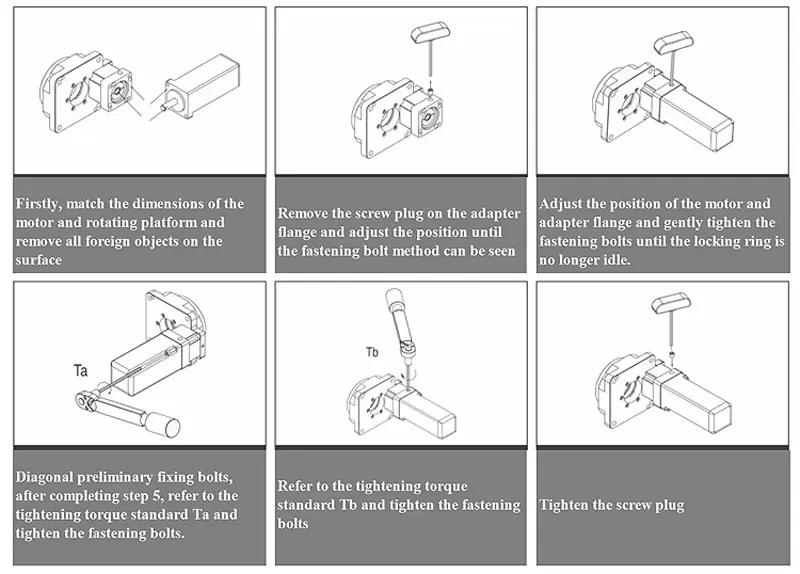
Installation Instructions
 +86-18664078178
+86-18664078178  Email
Email

